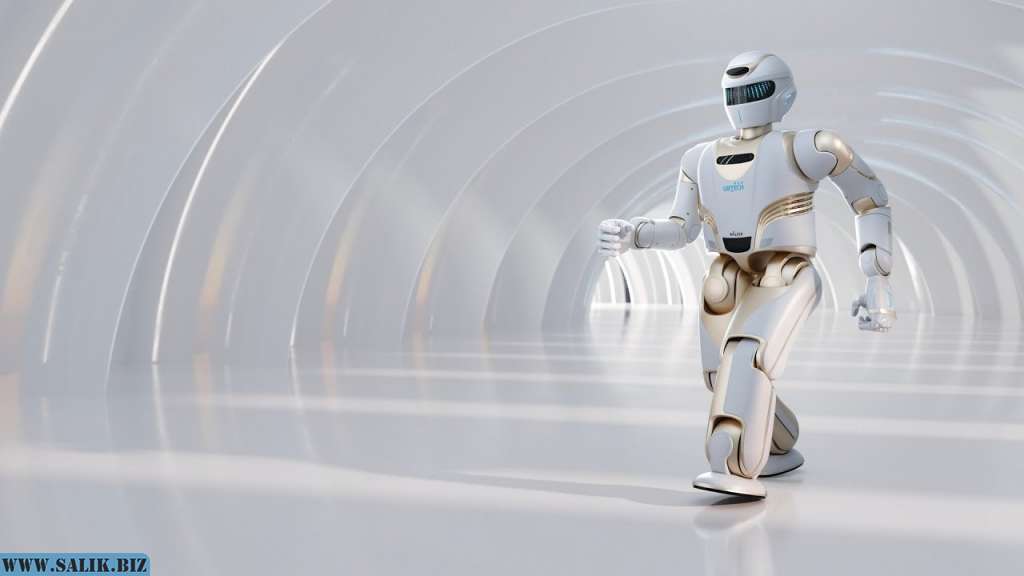

Китайская компания UBTECH Robotics представила человекоподобного робота Walker X. Он умеет обходить препятствия, брать в руки предметы и общаться с людьми голосом, а также световыми индикаторами. Видео с презентацией робота опубликовано на YouTube-канале компании.
Человекоподобные роботы позиционируются их разработчиками как устройства, которые в будущем будут сосуществовать с людьми, помогая им в быту, и заменять специалистов-людей в опасных условиях. В основном их можно разделить на два класса: полноразмерные роботы размером с человека, такие как Atlas и Digit, и небольшие с гораздо меньшим ростом, например, NAO от Softbank и Alpha от UBTECH Robotics. Помимо совсем небольшого коммерческого Alpha инженеры компании уже несколько лет разрабатывают робота промежуточного размера Walker и теперь представили его новую версию Walker X.
Компания не раскрывает точный размер прототипа, но известно, что рост предыдущей версии составлял 140 сантиметров, а у новой, судя по ролику, он такой же, как у ребенка возрастом в несколько лет и сидящего взрослого человека. По конструкции Walker X повторяет строение человеческого тела с руками, ногами и головой, приводимыми в движение 41 сервомотором. Кисти рук также повторяют человеческие и состоят из пяти пальцев. Робот может сжимать их, захватывать предметы и даже выполнять довольно сложные для роботов действия, например, откручивать крышку бутылки. Максимальная масса предметов, которые робот может держать в руках, составляет 2,7 килограмма.
Робот может общаться с людьми двумя способами. Во-первых, у него есть система распознавания и синтеза речи для общения голосом. А во-вторых, в голове на уровне глаз установлен большой экран, имитирующий мимику глаз — всего у робота предусмотрено 28 видов эмоций. Также на корпусе установлены световые индикаторы, активирующиеся во время тех или иных взаимодействий.
Walker X умеет автономно передвигаться в знакомых и новых местах, используя стандартный для этой задачи алгоритм одновременной локализации и построения карты (SLAM). Для навигации робот использует камеры глубины, расположенные в голове, груди и животе. С их помощью робот может обнаруживать препятствия и обходить их, а также отходить от людей и других подвижных объектов, когда они подходят слишком близко. Максимальная скорость ходьбы составляет три километра в час.
Разработчики продемонстрировали в ролике несколько возможностей робота. Например, он способен подниматься по лестнице и наклонной поверхности, причем он умеет подстраиваться, если угол наклона меняется в реальном времени. Также компания показала, как робот балансирует и удерживает себя на ногах, когда его толкают.